From the two class periods this week we learned about Pulse Width Modulation (PWM) and a little bit on motors and servos. I found PWM to be very interesting, seeing that it is seems to be just a manipulating way to get a desired effect. For example, to get a motor to work at a certain speed like we did in the lab, we simply changed how fast the voltage alternates between high and low. Since there is no in between states from HIGH to LOW, to get a desired average voltage to power a device, the rate at which power is sent to that device can be changed. If you have a 5V power source, but only need 3V for whatever reason, you can get that desired voltage by shutting off the source and turning it on again in a rapid state so that the average voltage is 3V. In order to modulate this in the lab, we wired a potentiometer into the circuit with the Arduino and a motor. The circuit also contains a diode and a transistor. I think one thing I would like to keep working on in this class is simplifying our circuitry but using less wires, utilizing all the space available on the breadboard to get a clear view of what’s happening. 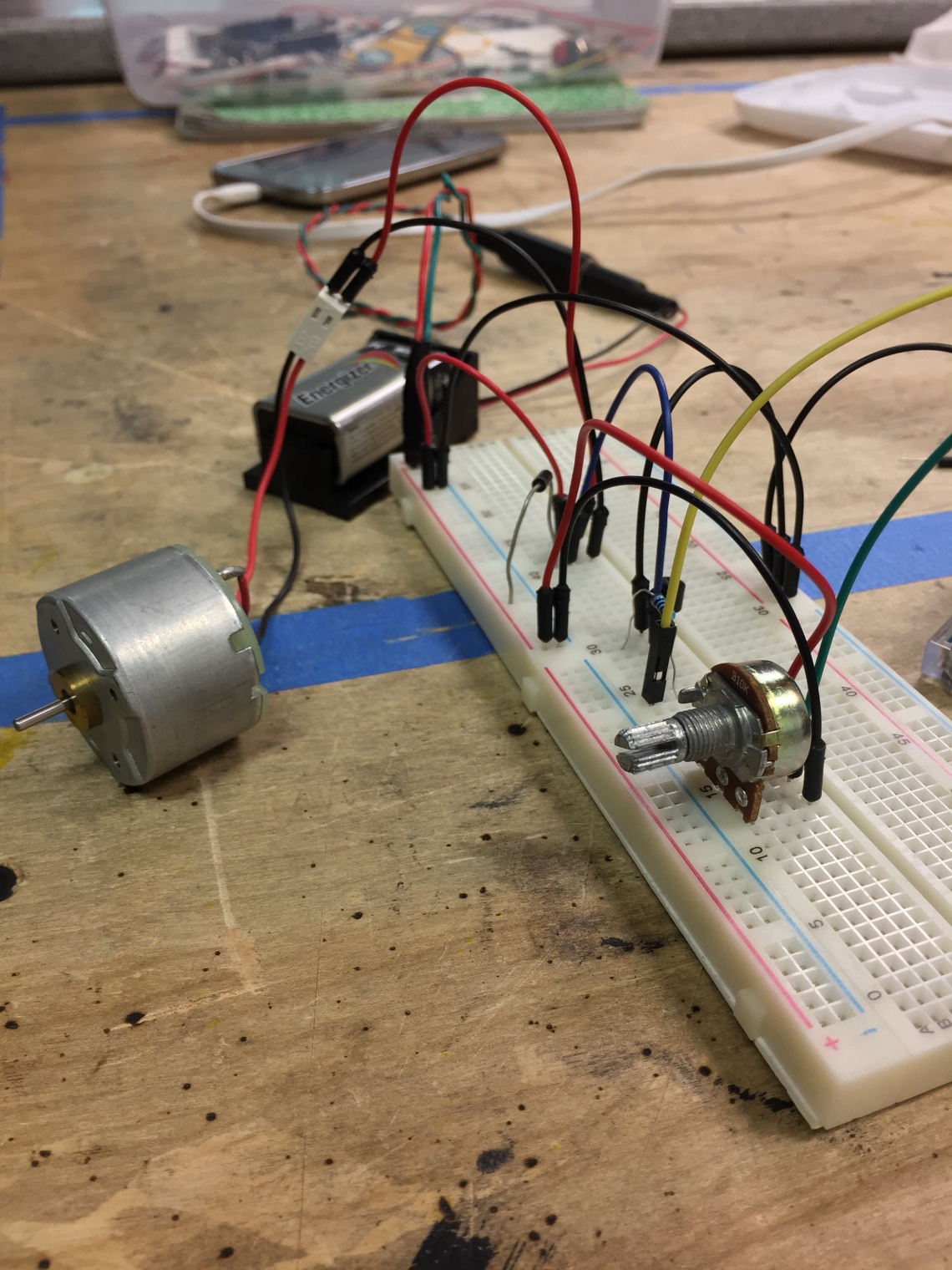
This week in lab, the Pulse Width Modulation gave me a few ideas for the Kitchen Object project. I think I would like to depart from dense code and flashing lights, and try working with a servo to make some type of rotating soup spoon (ladle) that would stir a bowl of stew. I overheard someone in lab saying that servo motors are powerful, and stew can get pretty thick. The only problem is I wouldn’t want stew to get all over the project ;).
