")
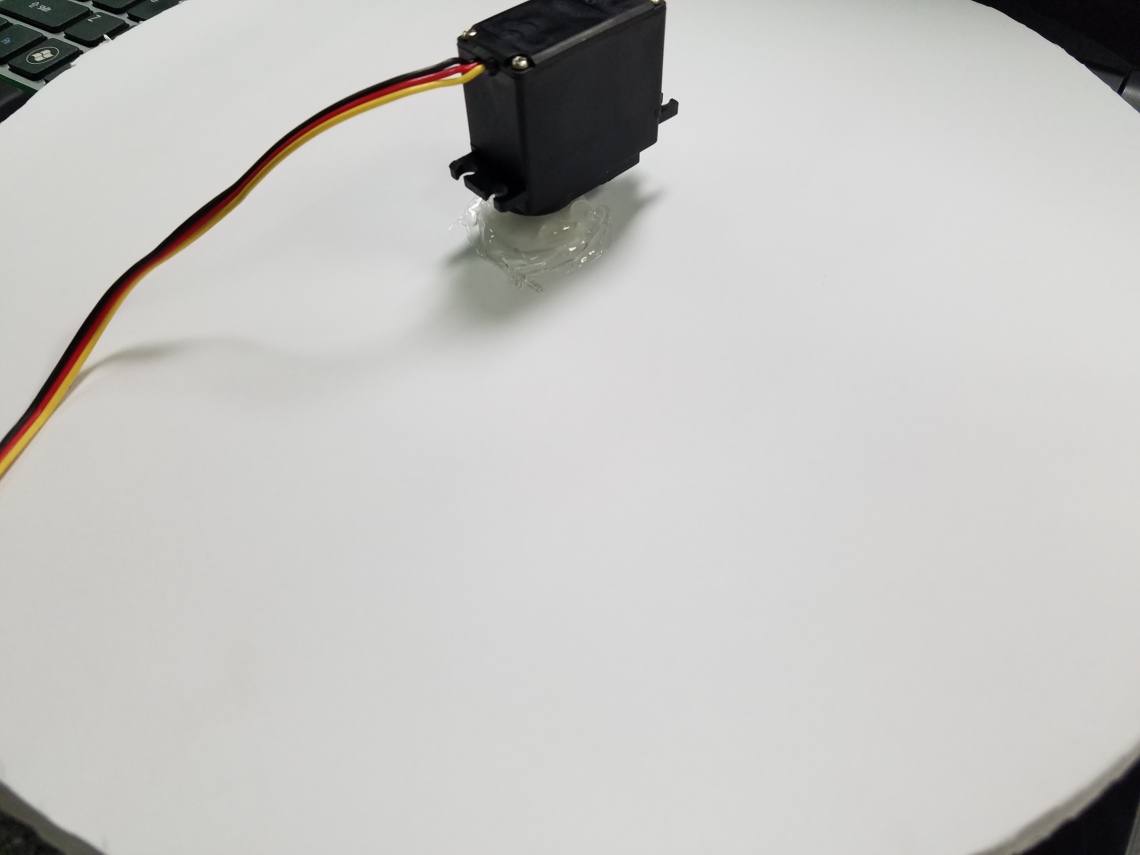
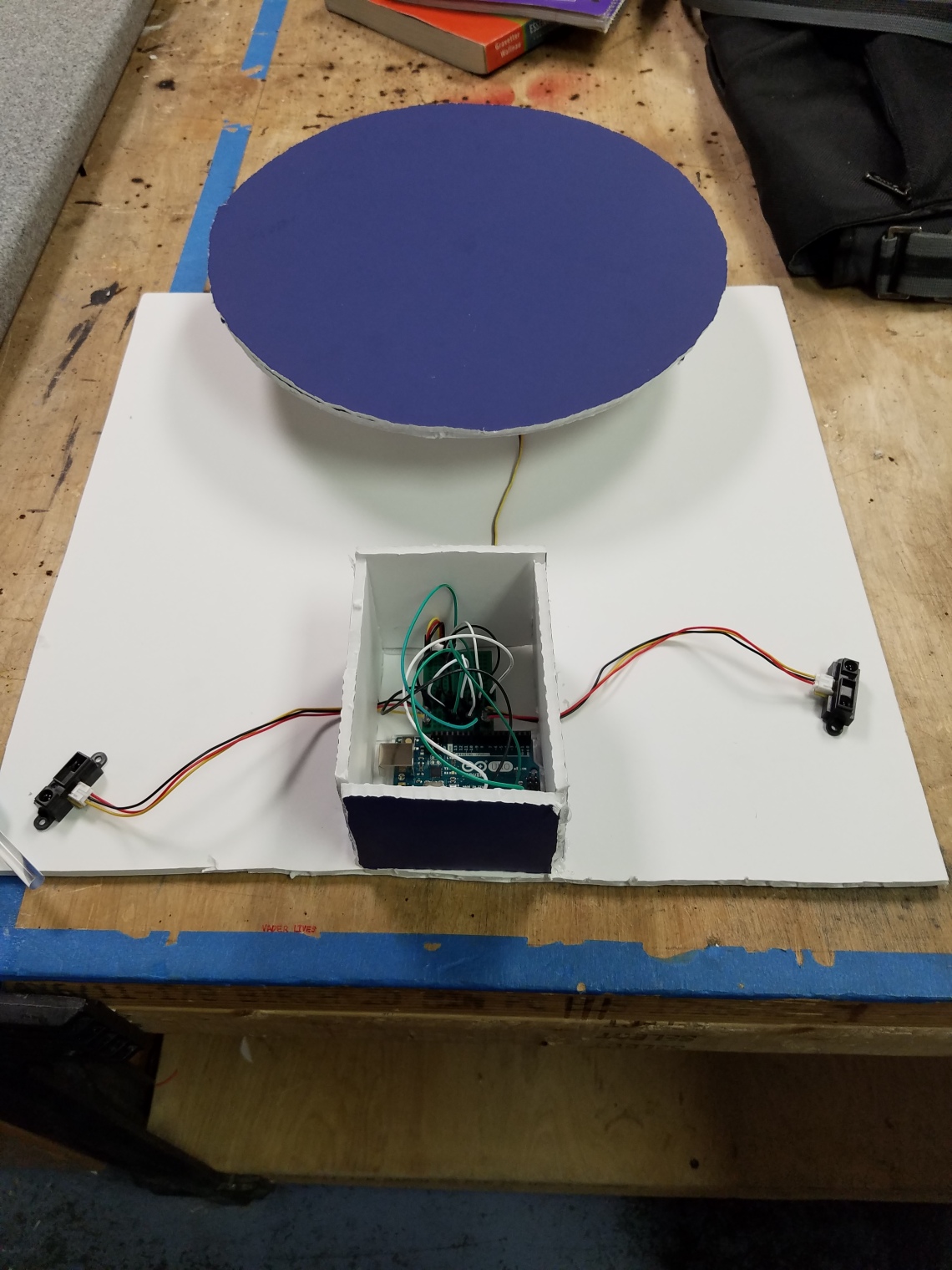
Since I do not use a kitchen here on campus I was not able to pinpoint a specific task that I would want to improve or create a device for. Instead I decided to try and “recreate” a previous class’ project which was a lazy Susan that moved without needing to be touched. In order to achieve this I made use of a servo for the rotation of the lazy Susan and I used 2 Infrared distance sensors. Once a distance threshold was crossed the servo would turn the lazy Susan in the corresponding direction. I did not use a continuous servo so after a point it will stop moving and in order to move it again you will have to trigger the other sensor.
Unlike the original project I chose to use foam core which is much lighter than wood and didn’t require any additional systems to be moved by the servo. Downside being that it is not sturdy enough to hold anything of a modest weight.